Традиционные методы повышения надежности инерциальных измерений основаны на использовании информации избыточных не ортогональных измерительных осей, вводимых в состав инерциального измерительного модуля. Принято считать, что такой подход не приводит к существенному увеличению объемно-массовых характеристик и энергопотребления, позволяя повысить надежность и отказоустойчивость инерциальных измерений. Однако, применение этого подхода на практике сдерживается несколькими причинами, основные из которых:
-существенное возрастание объема сложности и стоимости корпуса прибора;
-принципиальное снижение точности при применении не ортогонального измерительного базиса.
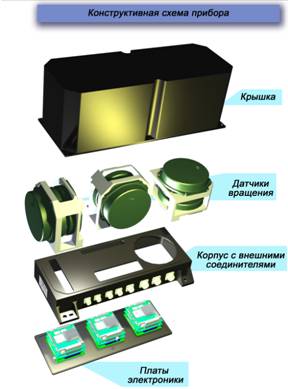
Указанных недостатков не имеет подход, при котором резервируются датчики в каждой оси чувствительности ортогонального измерительного базиса. Реализация этого подхода стала возможной вследствие постоянного улучшения габаритно-массовых и энергетических характеристик датчиков инерциальной информации.
На предприятии проработан прототип резервированного измерителя угловой скорости с ортогональным расположением осей чувствительности (РИУС). Высокая  отказоустойчивость достигается за счет троирования каждой из осей приборной системы координат. При проектировании этого прибора применена технология «Адаптивное к среде отказоустойчивое измерение», аналогичная технологии NASA - "Адаптированное к среде отказоустойчивое вычисление" (Environmentally Adaptive Fault-Tolerant Computing - EAFTC). Суть технологии заключается в том, что режимы работы прибора устанавливаются в зависимости от характеристик внешней среды (под средой в общем случае понимается совокупность таких факторов, как радиационная обстановка, «ответственность решаемой задачи», необходимая точность измерения и др.). Доступны следующие режимы работы:
отказоустойчивость достигается за счет троирования каждой из осей приборной системы координат. При проектировании этого прибора применена технология «Адаптивное к среде отказоустойчивое измерение», аналогичная технологии NASA - "Адаптированное к среде отказоустойчивое вычисление" (Environmentally Adaptive Fault-Tolerant Computing - EAFTC). Суть технологии заключается в том, что режимы работы прибора устанавливаются в зависимости от характеристик внешней среды (под средой в общем случае понимается совокупность таких факторов, как радиационная обстановка, «ответственность решаемой задачи», необходимая точность измерения и др.). Доступны следующие режимы работы:
1. Точный – с использованием приблизительного соглашения и осреднением результатов измерения угловой скорости по каждой из трех измерительных осей. Достижимое повышение точности в 1,7 раза. Этот режим может применяться при необходимости точной ориентации и стабилизации объектов.
2. Отказоустойчивый – с выборкой результатов «два из трех». Область применения – наиболее ответственные высокодинамичные участки траекторий полета.
3. Надежный, ресурсосберегающий – с вариантами холодного, горячего или смешанного резервирования. Переключение в этот режим может применяться при необходимости обеспечения длительных сроков активного существования, релаксационного восстановления при больших накопленных дозах ионизирующих излучений и др.
 Основные параметры и характеристики
Основные параметры и характеристики
1. Габариты, мм 420х220х140
2. Масса, кг 10,5±0,1
3. Напряжение питания, В от 23 до 32
4. Потребляемая мощность, Вт 55
5. Диапазон измерения, °/c ±80
6. Погрешность МК , % 0,02
7. Систематическая составляющая, °/с 3 · 10-4
8. Случайная составляющая, °/с 5 × 10-5
9. Шум, °/√ч 5 × 10-3
10. Готовность, мин 10
11.Ресурс, ч 50000 - 150000
Система управления движением малых космических аппаратов.
Система управления движением малых космических аппаратов (СУД МКА) осуществляет прием информации с датчиков угловой скорости и линейного ускорения, входящих в систему, обрабатывает ее с помощью специального программного обеспечения, формирует и выдает управляющие сигналы на исполнительные устройства СУД МКА (маховики, электромагнитная система ориентации). Структурная схема СУД МКА приведена на рис.1
Инерциальное ядро СУД МКА построено на основе многофункционального программируемого контроллера МПК ДКШГ.468332.002 прошедшего летно-конструкторские испытания в составе СУД КА «Фотон-М» №1,2,3 и блока измерителей угловых скоростей БИУС ВОА ДКШГ.402138.003 проходящего летно-конструкторские испытания в составе СУД КА «Ресурс-ДК1».
Минимальный состав СУД МКА:
Многофункциональный программируемый контроллер (МПК), состоящий из:
- центрального вычислительного устройства (ЦВУ)
процессор AMD Am5x86,16Мбайт ОЗУ, 512кбайт ПЗУ, 16Мбайт флеш диск;
- устройство выдачи команд управления (УВКУ) – 16 электронных ключей,
коммутируемый ток до 1А и напряжение 27В;
- устройство аналого-цифрового преобразования (УАЦП) - 16 мультиплексных каналов, 16 разрядное, программно аппаратный выбор пределов измерения биполярного и однополярного из ряда ±10В; ±5В; ±2,5В; ±1,25В; ±0,625В; 0-10В; 0-5В; 0-2,5В; 0-1,25В;
- устройство приема сигналов прерывания (УПСПр) - 8 разрядов приема импульсов отрицательного напряжения 27В, 8 разрядов приема сигналов с не запитанных контактов;
- устройство выдачи ТМ- информации (УТМ) - 33 электронных ключа,
коммутируемый ток до 5мА и напряжение 5В;
- канал управления приводами – 8 каналов коммутируемый ток до 1А и напряжение 27В;
- устройство приема информации с интегральных инерционных датчиков
6 интерфейсов RS232,
- источник питания со схемой управления
гальванически развязанный, импульсный, со схемой включения/выключения и сторожевым таймером.
1. Три ВОГ;
2. Три акселерометра.
Основные технические характеристики СУД МКА
|
1. Напряжение питания |
от 23 до 32 В |
|
2. Масса (минимальный состав) |
5 кг |
|
3. Потребляемая мощность системы |
10 Вт |
|
4. Время готовности |
20 с |
|
5. Ресурс |
50000 часов |